
Today, January 12, 2013, we the Suitbots have received the Inspire Award at the Antelope Valley FTC Qualifier. This is an amazing achievement for us as a team. Our goal this year was to do our best to be the team to inspire all of the others, and we have succeeded. We hope that receiving this award will inspire other teams to follow in our footsteps and be an inspiring team. Just to be labeled as a model of an ideal team that other teams can look up to is the best reward of all. We will use this amazing experience and honor to drive us to continue to do our best at all of the future competitions and hopefully make it to St. Louis by doing well at the LA FTC Championships in March.
Author: admin
1.6.13-Fear and Autonomouses
Attendance
- Fletcher
- Hunter
- Evan
Journal
Tasks
- Get the IR autonomous finished
- Driver Practice
- Prepare the field for pack up
Reflections
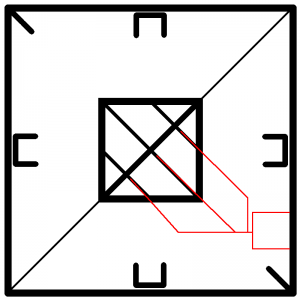
We started the day by working on the IR autonomous. Fletcher had already done some work on it, though the surface he had done the testing was quiet slippery and all the work he had done had to be redone. The calibration was done in a system of checking and adjusting where Fletcher would run the autonomous and Evan or Hunter would tell him how off of the target it was. Fletcher would then change the code based on their observations. One challenged we faced in this is robot placement. Some inaccuracies in robot placement, which was 21″ from the left wall [depicted] could cause the autonomous to fail. To lessen this problem, we made a stick that is 21″ in length.
We applied our check and adjust system to each of the three paths that could be taken. The rightmost path was particularly difficult because unlike the other two cases, it had three stages rather than two. The other two went forward for a little bit, turned and went forward again and put the ring on. The dextral path went forward a small amount, turned 90 degrees, went forward an amount, turned, went forward again, and put the ring on. While working on the right path, we were encountering problems with the robot being slow, which degraded the ability of our autonomouses, so we changed the batteries and fixed this problem. This all took from about 11:00 to 4:00 with lunch (where the pizza man drew a robot for us on the box!).
Once we finished the autonomous, we moved on to driver practice. In it, we found that the ideal place for the robot to rotate to put itself in the ideal place to get the ring is between the mechanism for moving the hand left and right and the tube that holds the hand on. We also found that if when removing a ring from a dispenser or when putting a ring on a peg we use the device to move the hand vertically to grab the ring or to let go of the ring (this is as apposed to doing this with the scissor lift).
Once driver practice was done, we started playing with the fork lift. We lowered the fork and put a skateboard, a spool of wire, a drill, and a bottle of Pepsi on it and lifted it, first with the peg assist, then after we got too high for the peg assist, just with the scissor. Sadly, this put too much strain on the scissor lift and bent several of the pieces on the lower portion and bent one in particular quiet badly in three place. Luckily, Evan was able too take the robot hame after this and replace the sections of the scissor lift with steel.

12.29.12-Robots Take what is Given to Them
Attendance
- Evan
Journal
Tasks
- Create LED circuits for weighted ring detection
- Swap out threaded rod drive shafts for a more aggressive one
- Mount the fork lift mechanism
- Mount the vertical bucket adjustment mechanism
Reflections


The new drive shafts are installed. With a 4-1 thread ratio it should take about 40 turns of the shaft to move the slide the entire length of the shaft. The threads are very precise and highly polished and the nut is made from a high-strength, low-friction polymer that moves very smoothly and precisely. We mounted both ends of the drive shafts into precision ball bearings, Purchased from McMaster-Carr, authorized by the First Tech Challenge. The entire mechanism is very smooth, has almost no slop or vibration, and should allow for very precise positioning. It should definitely up our game mechanically. Evan is reassembled the scissor, and then Evan had to finish hooking up the LEDs. This mechanism was cleverly put into place by utilizing the principle of two conductors with weight pressing them together completes the very simple circuit of turning on a light bulb, in this case being an LED. Everything should be ready to test by tomorrow morning. It took a bit longer than Evan had anticipated but it took a bit more engineering than also had been anticipated to design replacement shaft mounts, and Evan had to make totally new slides since the mounting hole spacing of the new nuts was completely different than the old ones. Evan attached 16 screws to the rear of the robot and then realized that it was very unstable and thus added two cross-members for increased strength and stability. Evan also thought the design for the mechanism. Evan also very carefully attached a servo style mechanism which allows for increased accessibility and ease of use.
12.13.12-The Rubber didn’t Burn
Attendance
- Fletcher
- Mark
- Hunter
- Dante
- Chris
- Erik
- Evan
Journal
Tasks
- Perfect all we can on the robot
- Put rubber inserts in our treads
- Continue to improve notebook
- Plan driving to the competition
- Test every parts
Reflections
Today was our second to last meeting before the Claremont competition on Saturday. We made some of the last adjustments to the robot but we did some testing. We put the rubber inserts on the treads. This actually completely messed up the driving. The parts of the treads that had sprockets on them would move up and down based on wether there was a large gap between inserts. This did not make the driving of the robot immediately better.
Evan found that one of the drive shafts for the scissor lift was damaged, so that ended up needing to be fixed.
The rubber inserts took forever to put in which left us with barely any time left.
Mark worked the entire time on the notebook but still has a lot left to do. We took the robot home after the meeting.
12.11.12-Pre-Competition Checks
Attendance
- Mark
- Evan
- Hunter
- Dante
- Erik
- Fletcher
Journal
Tasks
- Make sure everyone gets permission forms for Saturday
- Test the robot and find and fix problems
- Install new innovations that were worked on over the weekend
- Plan how to make the trifold display for Saturday
- Add to the journal
Reflections
Time to get everything as ready as possible for the Claremont FTC competition on Saturday. First we installed a new motor box so we could plug each motor for the scissor lift into separate ports. Evan thinks that this has made the scissor lift twice as fast.

We also installed a new, more simple hand on the robot that is a basket with two compartments for 2 rings and it is made out of metal and does work better than our old hand.

Then we got to testing the robot. This showed we probably shouldn’t for the top row because our scissor lift was really slow and it is hard to make the driving exact in getting right under the rings to pick them up so we want to make a mechanism that moves the hand forward on a slide so the driving just had to be in the general area and the accessories driver can take care of the rest.
We have also lately been talking a lot about infrared sensors and how to use them to detect exactly where the IR sensor is so we can get the extra fifty points in the autonomous period.
Hunter and Fletcher, since the programming did not need too much work, made a lot of ideas on the whiteboard about how we could improve our display on the trifold because we just threw it together last time and we would like to put an actual screen on the display while having all of our faces and a short biography about our team. See here for a detailed explanation.
