
Issac 5α, 5β, 5Ω (Res-Q!)
Isaac 4 (Cascade Effect!)
Isaac 3 and 3′ (Block Party!)
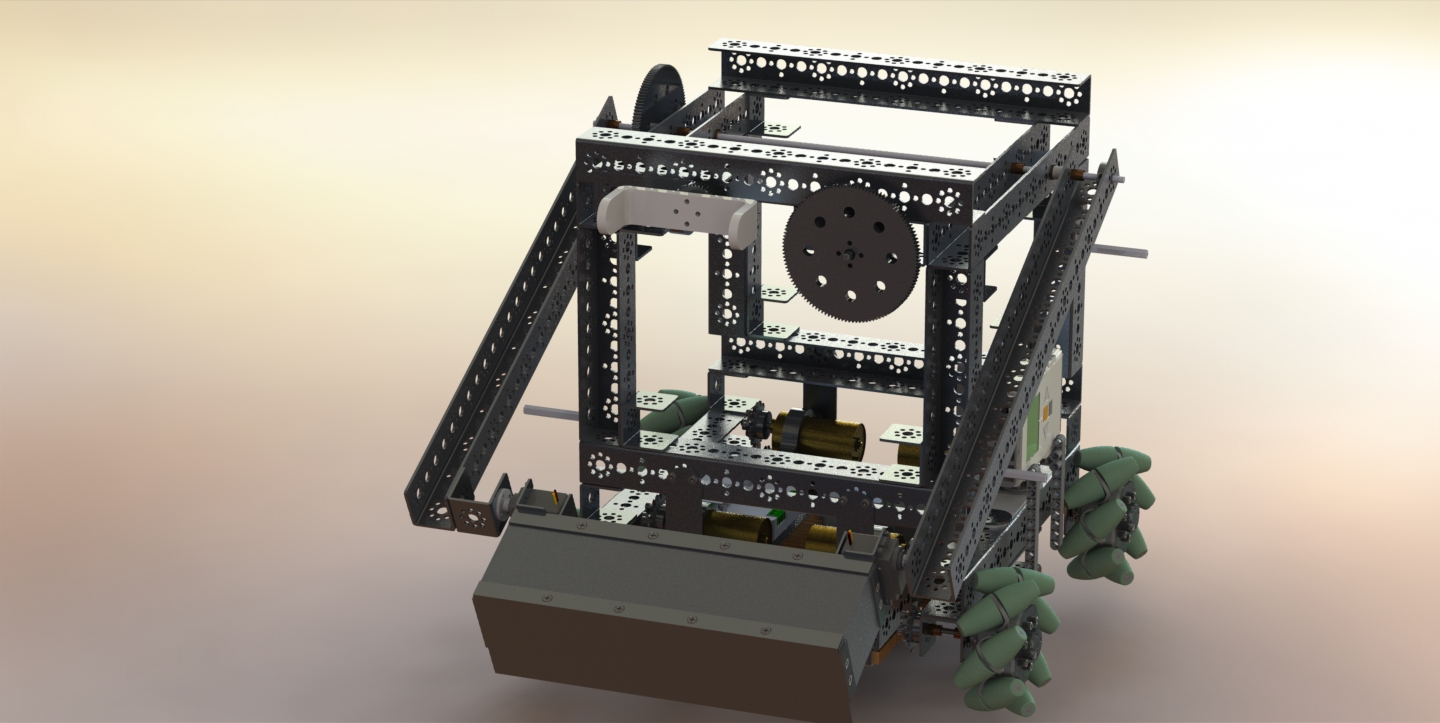
In the 2013 build season, we designed our robot in CAD for the first time. We started with out Isaac 3 design (left), which performed poorly at our first competition, due to many design flaws, so we started our build anew in December and built Isaac 3′.
Isaac 3′ featured a flag claw (Flag Raising Mechanism or FRM) that could raise the game’s flag to the maximum height in 3.41s, a scoop that could score around 12 cubes per match, a pull-up hook that could take 100 pounds of load, and an autonomous arm that simplified programming autonomous programs.
Isaac 3′ was regularly nominated for or won the PTC Design Award.
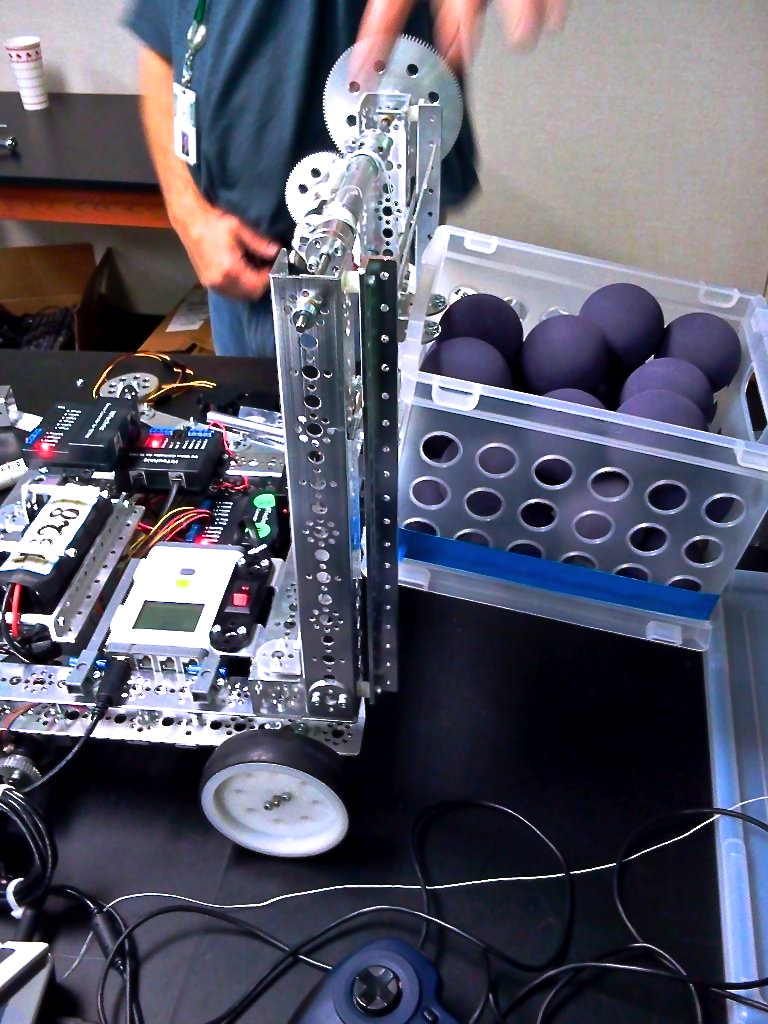
Isaac 2 (Ring it Up!)

The robot for our 2012–2013 season, Ring it Up!, was our biggest robot yet. It sized at 17.5″ x 17.5″ x 17.5″ and weighed in at 50lbs, the most of any robot we saw all season (we weighed nearly every robot in the LA/San Diego area). It featured a tank tread drive train and a scissor lift. The scissor lift with no load could raise to approximately 50″. The robot had a hand that could hold two rings and could indicate to drivers that there was a weighted ring in a slot. The hand had 180° pitch rotation and was attached to an arm that could raise and lower the hand, making for easy ring placement. There was also a fork lift for use in the end game. A light-weight robot (0 – 15lbs) could be lifted 30″ and a medium-sized robot (15 – 35lbs) could be lifted 7″. It was also competitive in the autonomous phase, with several successful ring placements on the IR column.
Isaac 2 set the lift record for the season in Los Angeles at 17″, and until the regional championship held the match record of 285.
Isaac (Bowled Over!)
The robot of our rookie season (2011–2012, Bowled Over!) was a small and mighty one. In interviews we were asked why we named it Isaac, and we would always tell them it was named for the father of modern robotics, Isaac Asimov, but it wasn’t. It was named for our friend Isaac who we wanted to join our team, and named the robot for him to convince him to join (he never did, though). Throughout the season, it went through several incarnations. Initially, it had a two-wheel drive system, with drive wheels in front and free-spinning omni wheels in the back. It had a single arm with an articulated hand that was good at picking up racquetballs. Later, we changed the drive train to be the same drive wheels, but with a single double-width omni wheel in back. It was quite prone to falling over in this stage. We later reverted the drive train and added an additional arm that could push racquetballs around. The autonomous pushed the bowling ball into the back corner and got the robot in there as well.