Cascade effect has been out now for two weeks, and as a part of the brainstorming that we’ve been doing, we played the game with people instead of robots. We did this last year for Block Party! and in it discovered the need for a holonomic drive. Below is video and a laundry list of things we discovered this year:
Dragging the tubes around haphazardly is very difficult, especially with the tallest one. Having a major penalty on top of a loss of 90cm worth of balls in the x3 tube is a huge loss in points.
Most of the time, some of the large balls get caught in the center element after you knock the kickstand over. For the end game, it’d definitely be worth it to have those big balls in the high tube.
The large balls were gone basically immediately, since the pack the least densely.
Because of this, filling the tall tube first was a fairly successful strategy because you get points at a very great rate that way.
A neat defensive strategy is to fill up the small tube and put it on the side of the field that you opponent is on, because they won’t want to run into it and knock it over, so they’ll be a little trapped.
People tended to stay on one side of the field until the second half of the match since there were enough balls to satisfy 3 tubes on either side, but this was also with one player per alliance.
We’re glad to announce our first two autonomous challenges. They are the following:
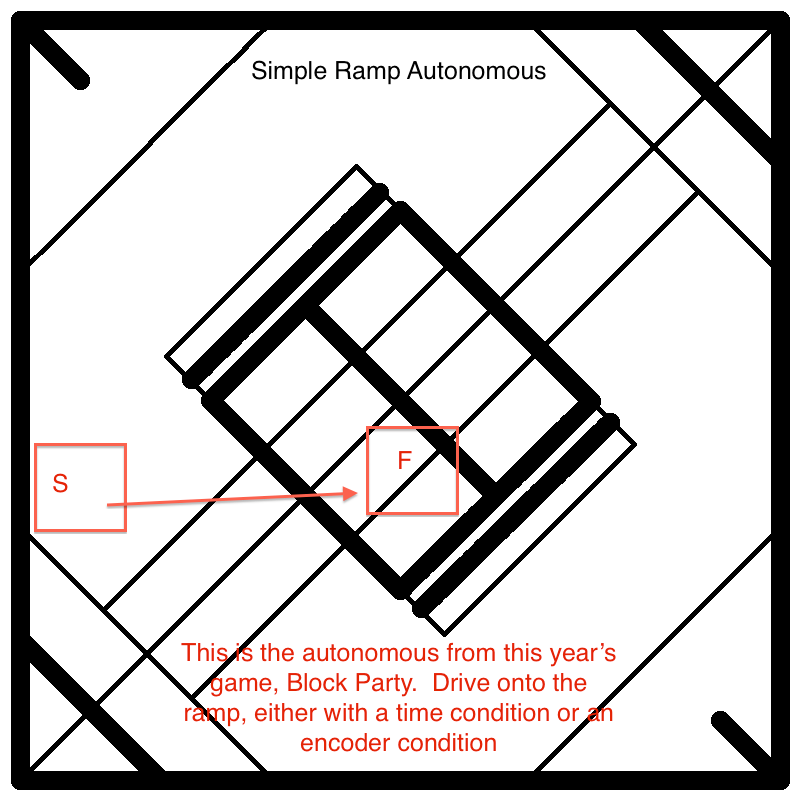
Simple Ramp
Taken from this year’s FTC game, this is an autonomous for beginning teams.
Suggested Sensors
Motor Encoders
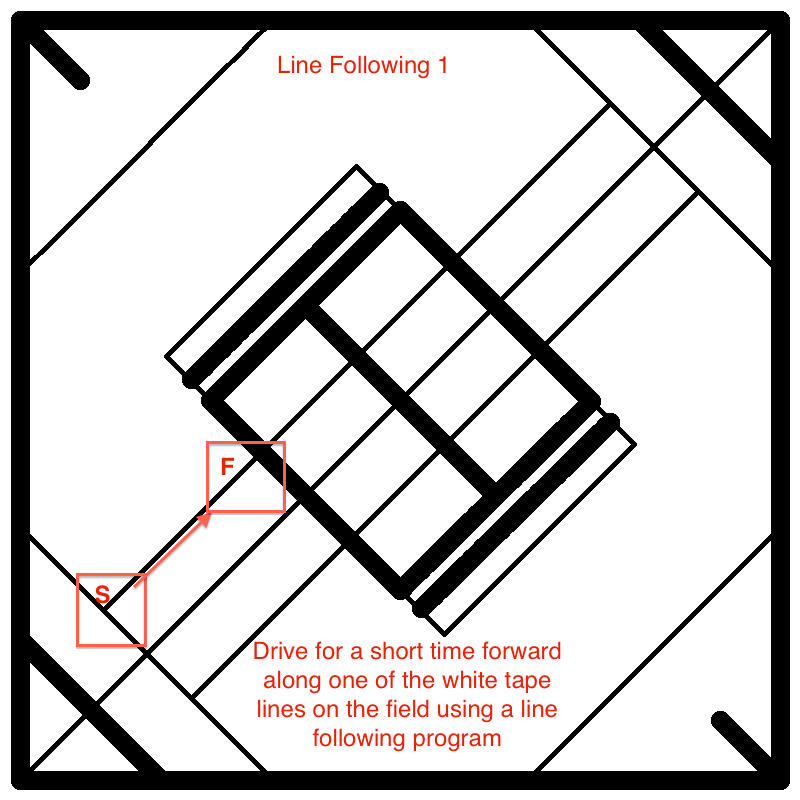
Line Following 1
A basic line following task. Good for the more advanced teams.
Suggested Sensors
One of the following:
LEGO Ambient light sensor
LEGO Color Sensor
HiTechnic Color Sensor
HiTechnic EOPD Sensor
Generally, having multiple of the same kind of sensor will make your line following better. This article has some information as to the different kind of algorithms one can use.
We often hear during alliance selection, “Team XXXX would like to graciously invite Team YYYY.” In reply, you’ll usually here, “Team YYYY graciously accepts.”
The people involved in this dialogue are both using the word “graciously” in allusion to Gracious Professionalism™. But are they using the word as they intend it to be received?
Gracious means to be kind or nice, in Great Britain, they sometimes call the queen, “Her gracious majesty.” It also has a connotation of being worthy of thanks. A person from Britain might want to thank the queen for having such a great country.
But what does this mean for alliance selection?
Team XXXX is saying to Team YYYY that they are doing something really nice by picking Team YYYY.
Likewise, when Team YYYY accepts, they’re saying that by accepting the offer of Team XXXX, they’re doing Team XXXX a favor.
Here’s a script that makes neither Team XXXX nor Team YYYY sound like like they’re using the word ‘gracious’ wrong:
“Team XXXX would like to invite Team YYYY”
“Team YYYY humbly accepts”
Note:
If, for whatever reason, your team wants to decline an alliance, this is what you would say:
For a while, FTC Teams have been using one of two drive trains: traction drive (there are several of these, but they’re all the same idea) and holonomic drive. Traction drive gives you speed and ability to drive over things, while holonomic gives you huge maneuverability by allowing movement in any direction.
A 6-wheel traction drive botA Holonomic drive for Bowled Over!There are other drive trains, like this swerve/crab drive made by 4112 The Warriors, but they’re not very common
But lets focus on the uncommon drive trains, since this year, according to rule o, you can use any wheels you want so long as they’re less than 4″ in diameter.
Tank Treads
There is tank treads, which are nothing new to FTC, but so few teams use them, I feel it necessary to refer to them as “uncommon”. They’re the most grippy things you can get for driving on the foam tiles because of how much area your robot’s weight is distributed on, but they don’t grip at all on the wooden field elements due to the fact they’re made of plastic. You can remedy that with rubber inserts on the treads, but depending on how heavy your robot is (for example, our 50 lb bot from last year), it can hinder you when your on the foam tiles. By our estimate, if you have a small or medium sized bot (small < 25 lbs, medium < 35 lbs), rubber inserts are okay (although this year, they’re not very necessary, since plain treads will park on the bridge on their own).
Our very heavy tank tread bot from last yearA light-weight tank tread bot (notice the rubber inserts)
Swerve/Crab Drive
You saw a picture of it above, it’s a drive train that combines the maneuverability of holonomic drive with the grippiness of a traction drive. The only downsides to it are the cost of the components, the mechanical complexity, and the software complexity. We spoke to the team that built the bot above, and they said that each wheel had a pair of bevel gears associated with it. One pair of bevel gears costs $30, times four makes more than $120 for the whole drive train. They also had a whole mess of chains and sprockets, which aren’t cheep either.
The drive train also uses a whole bunch of parts. According to Murphy’s law, that means that you’ll have to be fixing you drive train a lot.
The software isn’t awful, though. If you figure out how to write the function once, you’ll never have to write it again, although that first time is likely difficult.
But with all its downfalls, swerve drive, in terms of maneuverability, is actually better than holonomic drive. It changes direction faster and won’t slip and go in the wrong direction.
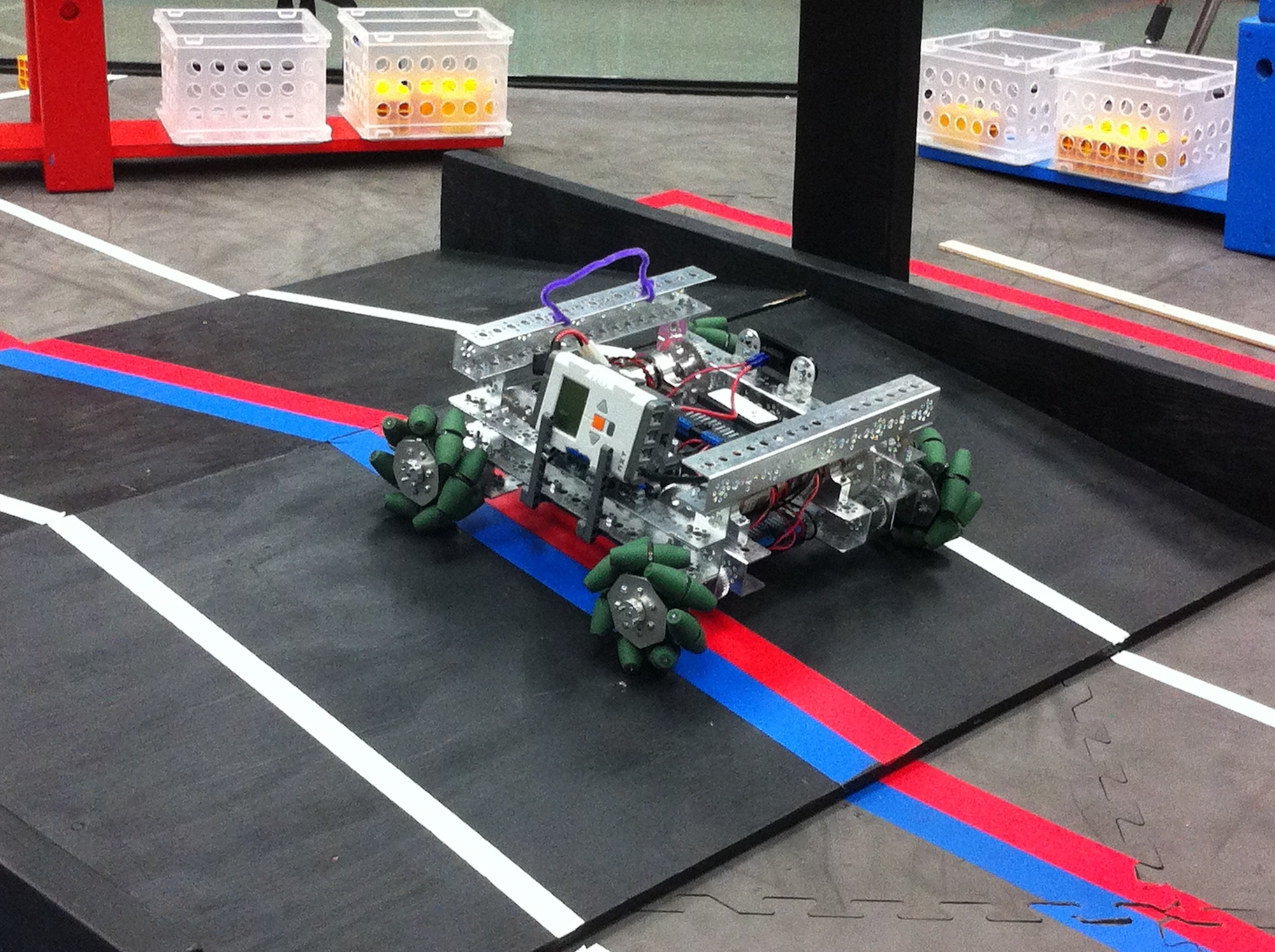
Mecanum Drive
FTC has never really used this one. It hasn’t been legal to use, since wheels are a new COTS for this for this year. Mecanum wheels are a lot the same as omni wheels; they allow for movement in any direction and they don’t get a lot of traction. Their advantages over omni wheels are that they use more motor power, so they go faster, it’s easier to make them move in a straight line, and they climb over obstacles easier than omni-wheels (assuming you’re not trying to climb them sideways, in which case they simply cannot).
Our Mecanum drive robot
It should also be noted that because Tetrix does not make mecanum wheels, there aren’t wheels that easily attach to the Tetrix kit of parts. We had to drill out holes in the wheels and make custom hub caps to attach ours.