Woo! New game! But what all is there to it? Where are the points? Where are the penalties?
Allow me to explain:
The Game
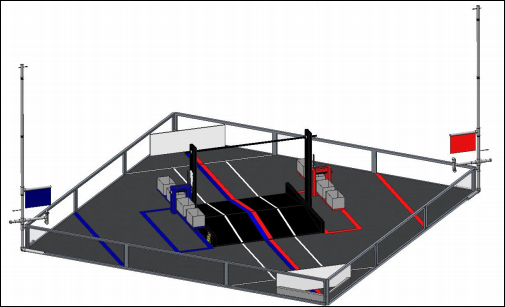
The field looks like this:
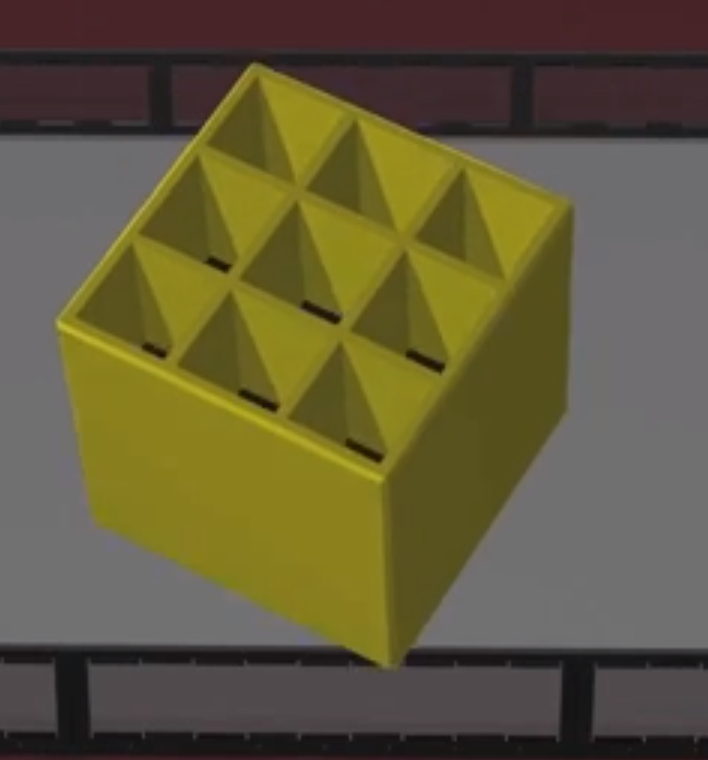
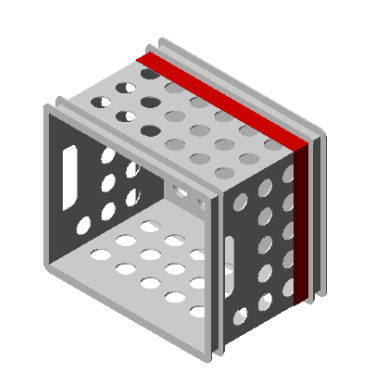
It’s divided diagonally, much like Ring it Up!, but now the platform in the middle is hugely complicated and the playing element is dispensed at corners rather than on the sides. The goal is to score 2″ cubes into Bowled Over! crates (both depicted below)
The scoring element, a 2″ cubeThe scoring crates
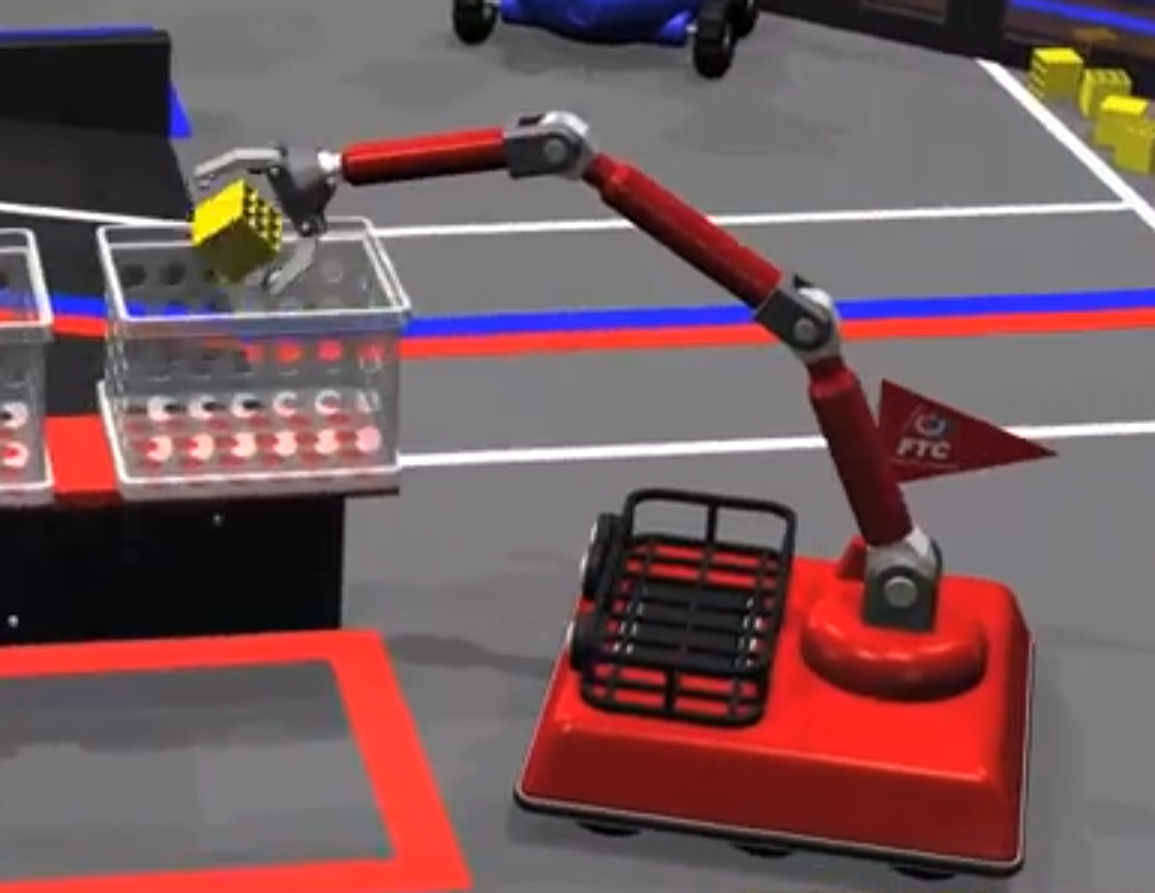
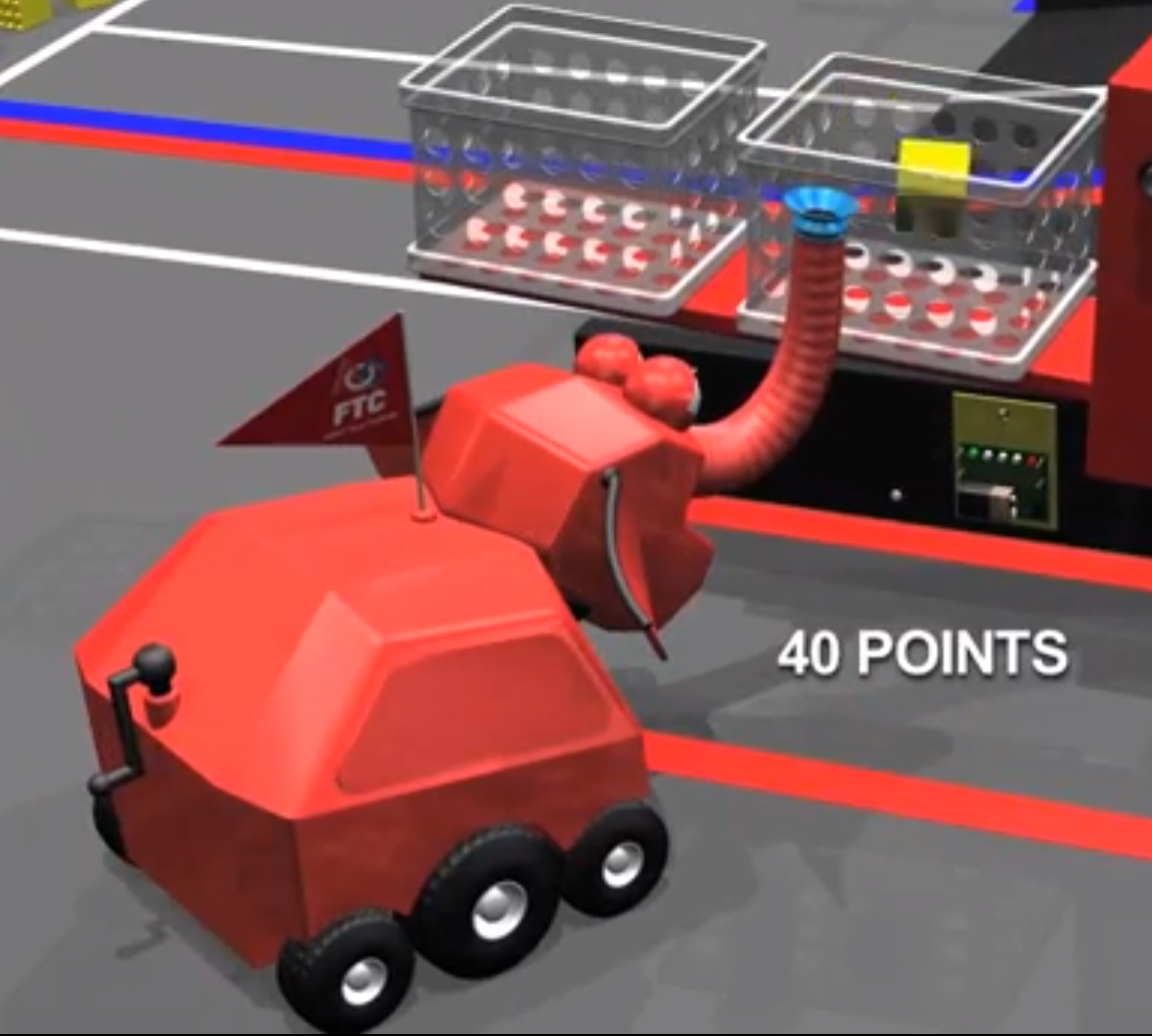
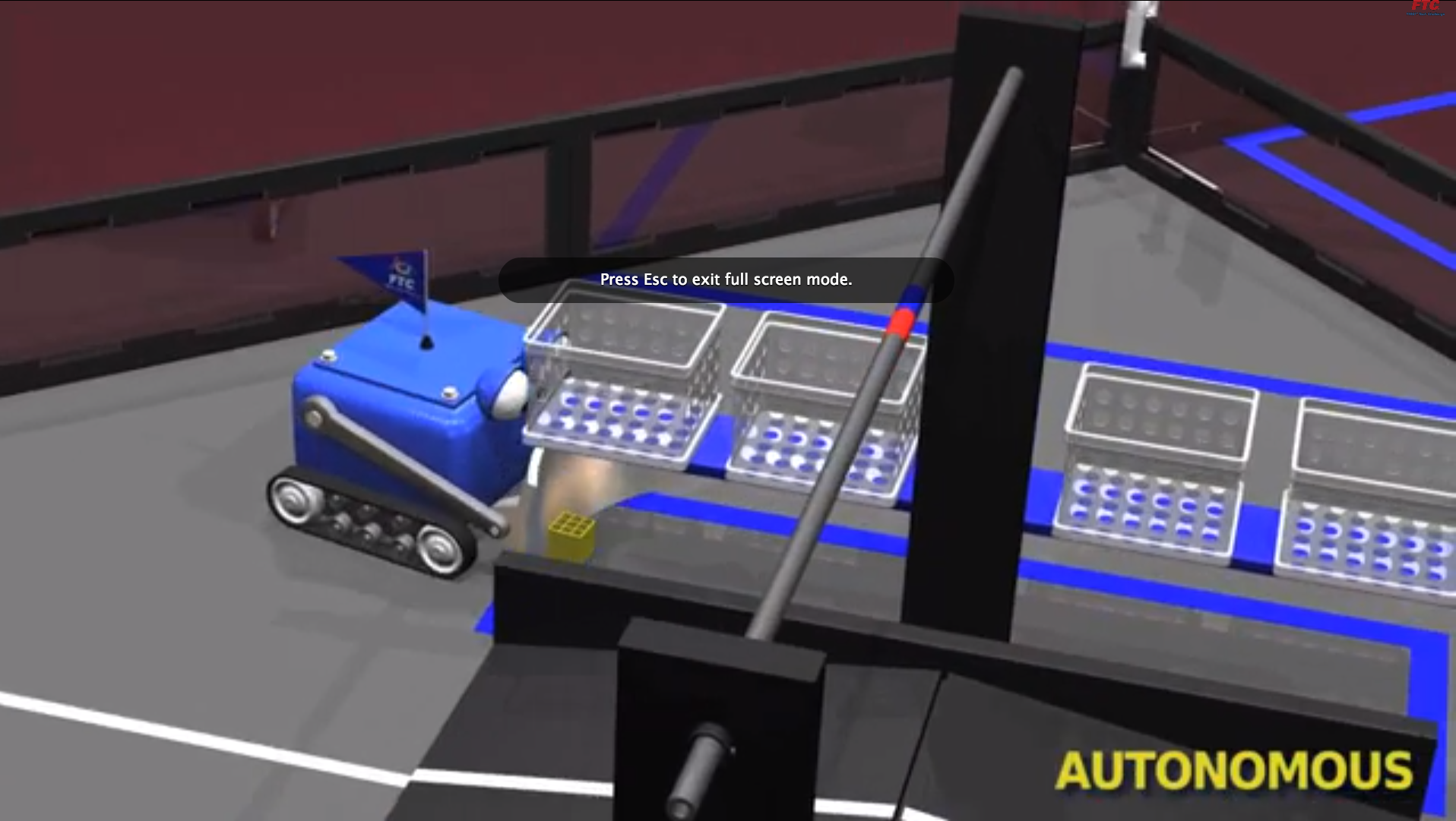
In the autonomous phase, points are scored by putting cubes in crates and driving the robot onto the center bridge.
20 points are awarded to teams that get cubes in cratesBut 40 points are given to teams that can score a cube above an IR beacon10 points are given for parking partially on the bridge, 20 for being all the way on the bridgeYou can also score 5 points by putting cubes a low goal
During the TeleOp phase, you can put cubes in crates and into the low goals. Cubes in the low goal count for 1 point, in outside crates are 3 points, and inside crates are two points.
In the end game, you have three choices as to how to play. You can choose to continue to do the TeleOp phase (and if your pendulum goal are balanced, you get a 50% multiplier to your score); you can raise your only alliance flag, which will score you 25 points if raised to half-mast and 35 points if raised to the top; and there is the hanging bonus (you may recall this from the FRC game Ultimate Ascent or the FTC game Hangin’-a-Round), where if you’re robot can grab the bar that is atop the bridge and pull itself up off the ground, then you get 50 points.
Penalties
In the past, penalties have been a deduction from the offender’s score. This year, penalties will be an addition to the non-offender’s score. That is, if the red alliance got a five-point penalty, the blue alliance would get five points added to their score, while the red alliance’s score remained the same.
Penalties are scored like so:
Minor Penalty—10 points
Major Penalty—50 points
DQ—Disqualified
These are the game-specific penalties (go to the game manual part 2 for the safety and general penalties):
Possessing more than 4 blocks at one time—Minor penalty ever 5 seconds; blocks cannot be scored
Harassing your opponent’s pendulum (unless you’re scoring in it)—Major penalty, unless it’s inadvertent, in which case there is no penalty
Scoring or de-scoring in your opponent’s pendulum in the end game—Major penalty, and the opposing alliance gets a balance bonus
De-scoring (except from floor goal)—Major penalty
Touching cubes after the match ends—cubes won’t be scored
Scoring non-preloaded cubes in autonomous mode—cubes will not be counted
Hanging interference—Major penalty
Touching an opponent’s flagpole—Major penalty if intentional
Blocking opponent’s flag zone in end game—Major penalty
Touching robot after IR beacons are placed—minor penalty, team might not be able to score for autonomous crates
Grabbing, grappling, or attaching robot to field components—allowed (not a penalty; this usually is a penalty)
Of course, read through the game manual part 2 to completely understand the rules, and read through the game manual part 1 as well (and our summary of it)
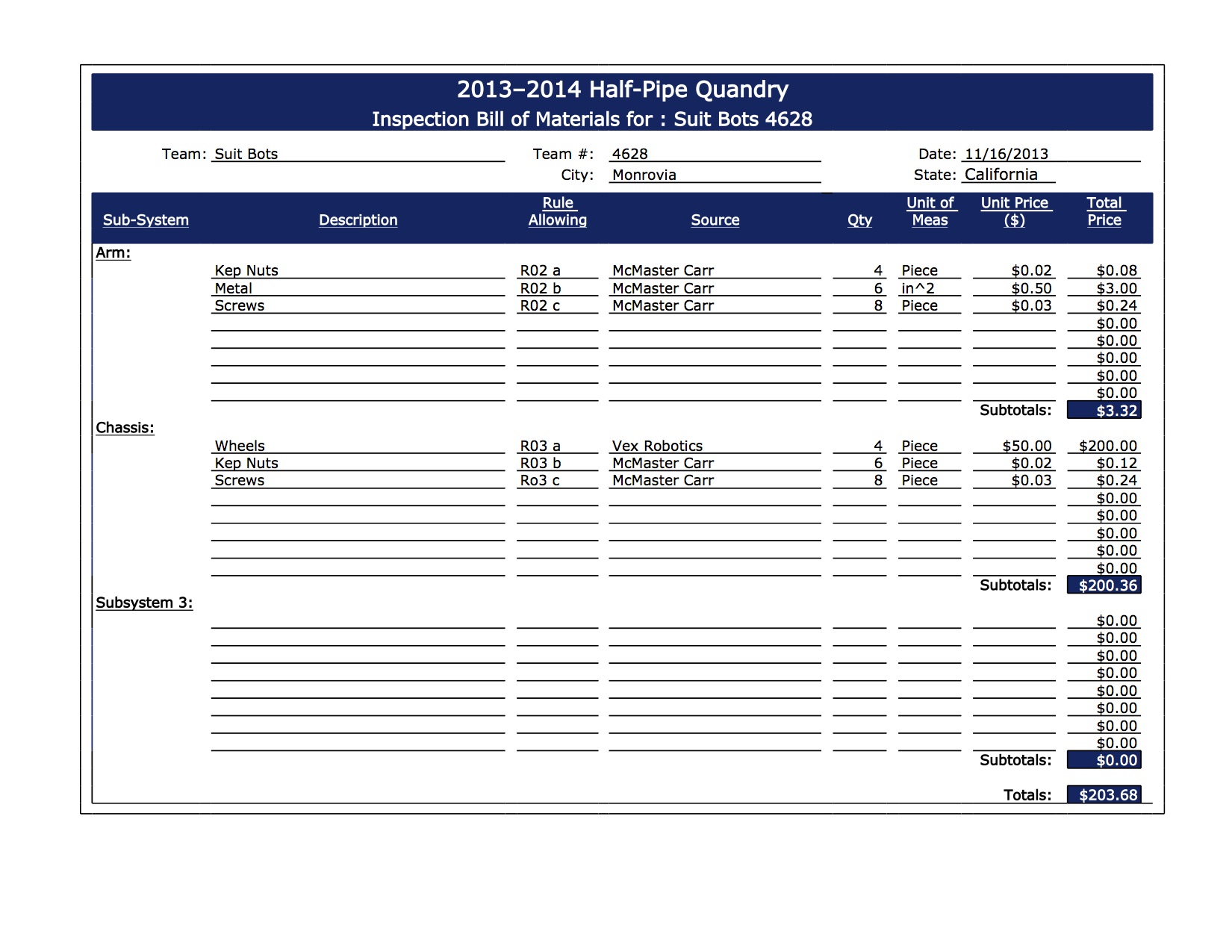
At all your hardware inspections, you must present a bill of materials (BOM) to the inspectors to ensure that you are complying with all the FTC rules regarding materials. The bills of materials for different teams can range anywhere from a nicely-typed spreadsheet to a quickly-handwritten-on-the-way-over bill (both of which we happened to use this year). Because the judges, in addition to the inspectors, will be seeing your BOM, you probably want it to look nice and like you put time into it. FRC has this problem solved by having a template for their BOM. We’ve taken their template and tweaked it a bit.
Our FTC BOM template filled out for an imaginary game
In it you’ll note that each subsystem has it own list. FTC doesn’t require that you do this, in fact, the only parts of this BOM template that are required are the part name and the rule allowing it. The reason that the rest was added is so that it can be a more effective BOM. The purpose of the bill of materials is that if somehow part of your robot disappeared, you’d be able to get all the parts for it. Having the subsystems separated will let you look at that subsystem and see exactly what parts you used for it. Having the source, quantity, unit of measure, and price make it so that you don’t have to go through the hassle of finding how big or how many parts you, and you don’t have to search for the good deal you found initially. Furthermore, if judges see this BOM after a day of handwritten ones, they’ll love it.
From the wizard in Window>Configure Joysticks, you can choose a controller and assign the value of one of these variables, say joystick.joy1_x1, and set it to one of the values for another variable. joystick.joy1_x1 can be assigned to the value of the right y-axis and joystick.joy1_y2 can be assigned to the value of the left x-axis. At first glance, this feature seems rather unhelpful, but if you find that it’s easier to think of the right joystick being joy1, then you can switch the values. It’s also helpful if you are using controllers that have joysticks with 3 axes of motion, you can make one of the existing variables be the left z-axis.
Although this could be useful, it will not be for FTC teams, because we may not use it due to the way the field control software works, but FRC teams may use it, making the world of 3-dimensional joysticks more easily accessible.
The game manual (part 1) of the 2013–2014 season was released on 1 July 2013 here. It details what the non-game-specific rules for the coming season are going to be (eg. what size sizing cube your robot must fit in).
We assume you know all the rules from last year, so we’ve compiled the differences from last year to this year.
The tournaments will, with the exception for a couple of things will be the same. There will be new super-regional tournaments that teams must qualify for in order to qualify for worlds. You qualify for super-regionals, and from there qualify for worlds. There also is going to be a new Control Award, awarded for outstanding use of sensors and software.
The engineering notebook has had a suggestion of a summary page at the start; a page talking about how you inspire, design, or control (connect, motivate, think, innovate, promote, compass) in a one-page statement.
In the past, the power switch on the robot had to be easy-to-see and accessible. Now this year, it must be labeled with a sticker, seen below. The game manual does not specify as to whether you make customize the sticker, but we have asked and are awaiting response.
The sticker you have to put on your robot near the power switch
If your team invested in the new Lego Mindstorms EV3, you will not be allowed to use it for your robot.
In the section about what COTS (commercial off-the-shelf) parts allow, a whole host have been added, and we list them here:
#35 chain
Timing Belts of any size or pitch
Gears of any size or pitch, including non-circular gears
Sprockets of any size or pitch
Pulleys including sheaves, timing belt, etc.
Springs that are used in a safe manner
Fasteners (nuts, bolts, screws, washers, rivets, Velcro, etc.) of any size
Bearings of any type or material
PVC, CPVC, PEX pipe and fittings
Extruded T-slot aluminum construction material
Wheels of any sort that are less than 4″ in diameter
These COTS may be used in any quantity
They also added a couple of raw materials:
Adhesive-backed tape
Glue, cement, and adhesives
This year, unlike previous years, you can weld your robot together. Brazing and soldering are also allowed.
Microprocessors, like Arduinos, will be allowed again this year, and will be allowed a little more liberally. You may have one doing function on your robot if it is powered by the Tetrix SuperPro prototype board or the NXT prototype board. They still will be allowed if they are only powering decorative LEDs.
This year, in addition to the servos we’ve been allowed, there also will be quarter-scale servos, but there are a lot of rules surrounding them. On one servo controller, you may have only two of them, and if you have two on one controller, you may only have one standard-size servo on that controller. If only one mini servo is on the controller, you can have up to four standard servos.
For wires that need to disconnect and reconnect frequently on your bot, you may use Anderson PowerPole or other similar crimp or quick connect style connectors. You also may use power splitters in you circuits.
If you have decorative LEDs, they can be powered by an external battery, but if the LEDs are used as visual cues for drivers, then they must be powered by a prototype board.
The connectors on the TETRIX and MATRIX battery packs may be replaced or augmented with any compatible connector described in <R08.q> (about two thirds of the way down).
This year, having a camera on your robot for recording matches has been specifically allowed, provided the camera is for post-match entertainment and does not have wireless capabilities.
3D printed parts are allowed this year, but they must be designed by the team or a team member.
The new Control Award was mentioned above. This is what FIRST™ wrote about the control award:
Team demonstrates respect and Gracious Professionalism to all
Team must submit an Engineering Notebook with an Engineering Section
Control Components must be documented in the Engineering Notebook
Control Components must enhance the functionality of the robot on the field
Control Components must work reliably
Teams are encouraged to demonstrate control components to the Judges
Advanced software techniques and algorithms are encouraged
Prototyped sensors and custom hardware are encouraged
Note the part where it said, “Engineering Notebook with an Engineering Section.” You will need to have an engineering section in your notebook. This section is also required for the PTC Design Award and the Rockwell Collins Innovate Award.
And on to my personal favorite (non-Inspire) award, the Promote Award. This year, the prompt is, “Leadership is.”
For most FTC teams, the Judges’ Award has not changed, but for those of us in Los Angeles, you will recall that upon winning the award, your team will have registration in LA for the next season for free.
Of course the rules will be subject to change in the form of FTC updating the document and in forum posts, so check up on those to see any changes in the rules.