Attendance
- Mark
- Dante
- Erik
- Chris
- Hunter
- Evan
- Fletcher
Journal
Tasks
- Plan what we want to accomplish for San Diego
- Autonomous testing and calibrating
- Make videos that display the different features of our team
- Make lots of drawings of the current robot
- Add a page to the notbook called robot design
- Assist the Kings and Queens becaus they have no computer
Reflections
The reason for the big gap between meetings is the fact that we did not meet during finals week so everyone could study and we didn’t meet the week after because we had the majority of that week off due to Martin Luther King day and furlough days.
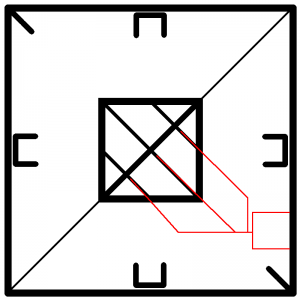
We spent the first part of our meeting doing a considerable amount of planning for the San Diego championships. Our main goals are to maintain the robot in its current state because we want to work on perfecting everything else, adding to the engineering book all of the drawings that we have done but never put in the notebook, perfecting the IR autonomous so it works every time, getting in as much driving practice as possible so we don’t have to waste time getting centered, etc. during the matches, improving our poster board and designing as well as implementing the projected display we plan to have that will be touch sensitive on whatever surface it projects on, and do our best to maintain the level of work habit and focus we have had throughout the year.
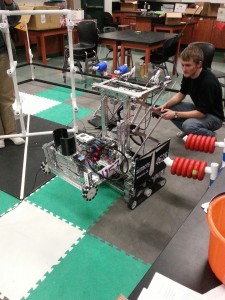
Evan added an additional two rollers to each side of the robot in the treads between the middle roller and the two outside rollers. We did this in order to spread out the weight of the robot more so turning is faster and more efficient.
Hunter has been working on making videos and pictures that we will put in our projected display including nice pictures of each member individually. We plan to organize the display on Thursday.
The Kings and Queens for some reason do not have a computer to program or run their robot so we have lent them one of our old computers to use for the rest of the year on the grounds that they return it, and also because we will always jump at chances to be gracious and professional.
Erik, Dante, and Chris have been working on making final drawings of the latest elements of the robot including the gears of the scissor lift, the scissor lift itself, the treads, the forklift, the hand, and the mechanism to move the hand up and down. We are also planning to put all of these drawings together along with a compilation of all of the drawings from previous elements of the robot to show the evolution of all of the major parts of the robot.